Мета закинута
Автор не відписував в цілі 7 років 2 месяця 27 днів

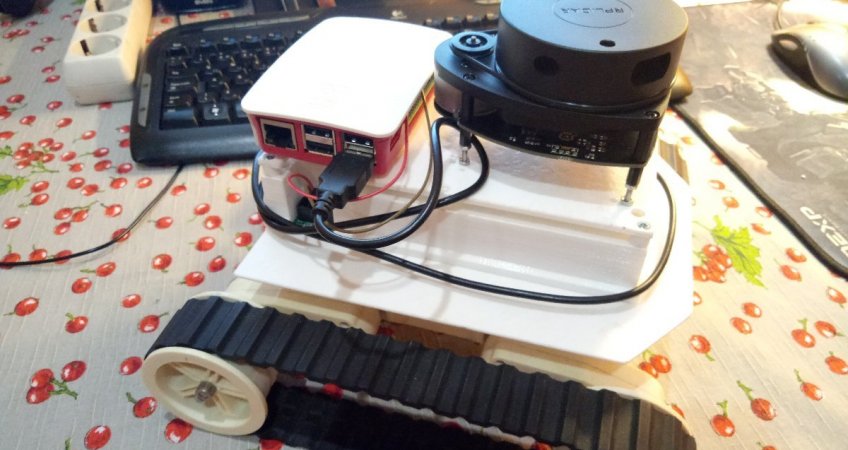
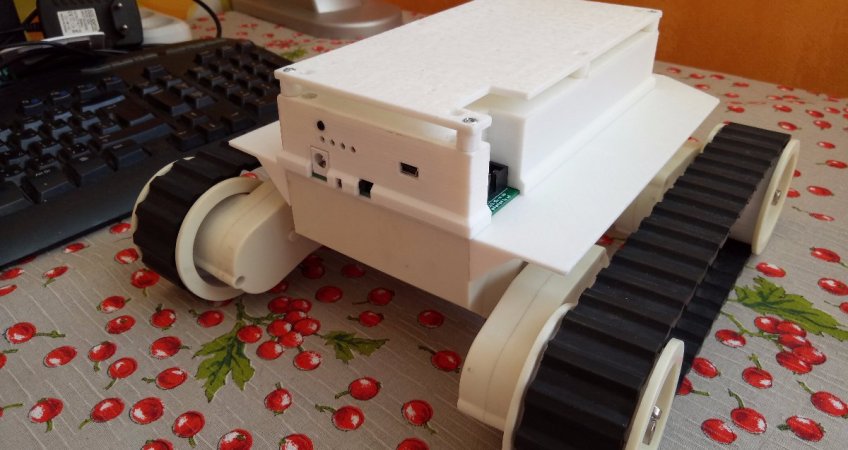
Гусеничный робот
Сайт проекта: роботяга.рф
Робот как основа для своего проекта или же игрушка для обучения программированию. Наличие открытой архитектуры и гибкого API позволит использовать платформу по вашему назначению.
Цель робота - предоставить платформу для реализации собственных идей робототехники не отвлекаясь на задачи перемещения.
Достоинства робота:
- Мощное гусеничное шасси
- Гибкое API для управления платформой
- Беспроводная связь
- Открытая и доступная модульная архитектура робота
- Аккумуляторная батарея с функцией контроля уровня заряда
- Мобильное приложение для беспороводного управления с исходным кодом
- Техническая поддержка
Критерій завершення
Робот объезжает квартиру и строит карту
-
Разработка API робота
-
Написание документации по API
-
Реализация API
-
-
Разработка мобильного приложения
-
Выбор среды разработки
-
Реализация приложения для управления роботом
-
-
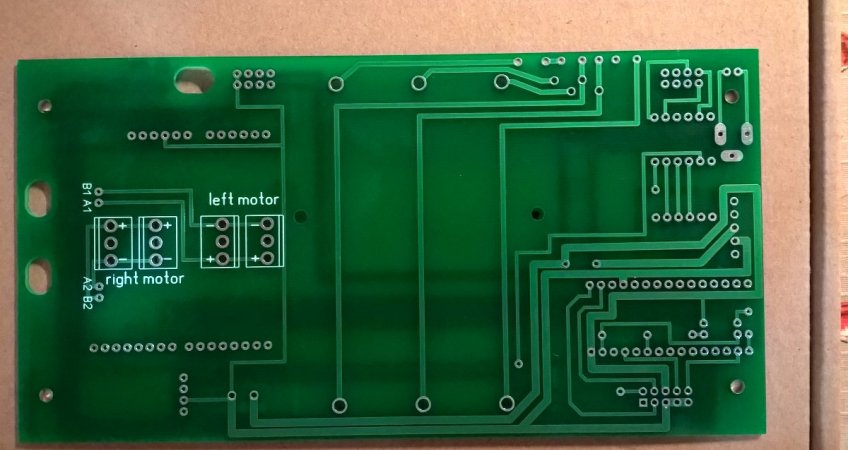
Проектирование печатной платы, установка аккумуляторных батарей с функцией заряда и контроля заряда
Вартість етапу — 40.2 $
-
Заказ уккумуляторов
-
Разработка средства замера заряда аккумулятора
-
Проектирование мат. платы для установки компонентов
-
Создание прототипа мат. плат и проверка работоспособности
-
Заказ производства печатных плат
-
Написание библиотеки работы с аккумулятором
-
-
Разработка и заказ корпуса
Вартість етапу — 67.01 $
-
Разработка 3d модели DAGU Rover 5
-
Разработка 3d модели верхней части
-
Заказ корпуса
-
-
Проверка сборки
Вартість етапу — 67.01 $
-
Разработка документации по сборке и использованию робота
-
Собрать по документации нового робота. Выявить проблемы при сборке.
-
Придумать способ заливки ПО на микроконтроллер
-
Выбор способа лицензирование результатов интеллектуальной деятельности
-
-
Открытие сайта
Вартість етапу — 67.01 $
-
Купить хостинг
-
Развернуть CMS
-
Выбрать дизайн и применить его
-
-
Работа над ошибками
Исправляем недочеты первой итерации. Правим плату, корпус и ПО. Заказываем, пока идет доставка - заполняем контент сайта.
-
Тест текущей сборки и получение полного перечня недочетов
-
Правки недочетов платы
-
Заказ платы
-
Правки недочетов корпуса
-
Заказ корпуса
-
Доделка API и мобильного приложения
-
-
Раскрутка сайта
Публикация рекламы и другой информации с целью представления робота на рынке.
-
SEO оптимизация
-
-
Старт продаж на сайте
-
Открытие магазина на сайте. Продажа платы.
-
Поиск онлайн магазинов для размещения
-
-
Доводка до продукта. Заполнение сайта
-
Скомпилировать приложение под Android
-
Создать видео об управлении роботом через приложение
-
Создать видео об управлении роботом через подключение по Bluetooth
-
Разместить статьи о робота на сайтах проектов для ардуино: thingiverse.com, arduino-projects.ru
-
-
Внедрение SLAM
На этом этапе мы должны на нашу платформу поставить Raspberry Pi с системой Visual SLAM и в результате должны получить траекторию движения. Сам робот пока управляется человеком, автоматического движения нет. Просто учимся ориентироваться в пространстве.
Вартість етапу — 9.38 $
-
Установка SLAM на Raspberry Pi
-
Транслирование видео с камеры в SLAM
-
Получение траектории движения
-
-
Сделать платформу ROS совместимой
-
Установить лидар и реализовать стек навигации ROS
Вартість етапу — 80.41 $
Не пропустіть нові записи!
Підпишіться на ціль і стежте за її досягненням



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}