
Собрать FPV Racer 250 класса
Загорелся идеей раздобыть себе #FPV #Drone Racer для веселых полетушек по лесу =)
Глянул на готовый комплект от TBS GEMINI -FPV RACER .... охренел от цены и решил собрать нечто подобное сам.
Критерий завершения
Коптер собран и летает
Личные ресурсы
Руки
-
Подбор комплектующих
Начнем с рамы.
Выбор пал на TAROT TL 250 A
На раме уже есть разводка под энергосистему интегрированная в раму, что позволит установить всю необходимую электронику ( полетный контроллер, регуляторы оборотов, приемо-передатчики и т.д.). Такое решение позволяет сделать конструкцию аккуратно, без торчащих во все стороны проводов, кроме того это сокращает время монтажа электроники. Рама коптера, сделана из пластины 2мм карбона. Так же в комплекте есть шасси.
Интегрированная проводка, уменьшает помехи и наводки от электроники.
Посадочное место под камеру имеет несколько отверстий и подходит под разные камеры.
Рама имеет прочную и жесткую конструкцию.
Силовой разъем XT60 расположен прямо на раме.
Так же она хорошо продумана и сбалансирована.
Далее - полетный котроллер.
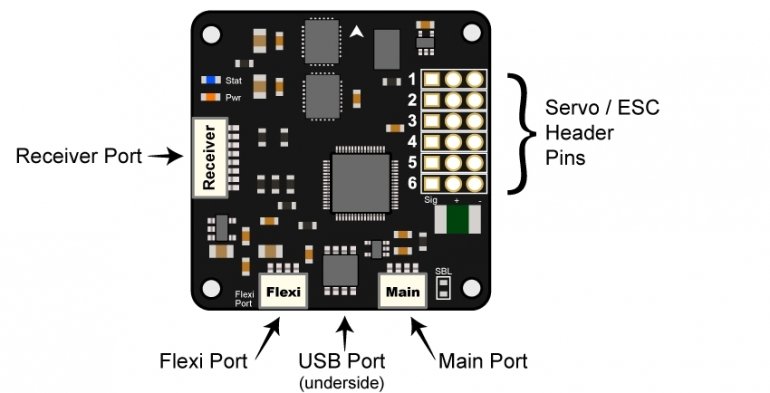
Пока думаю о CC3D Openpilot Open Source Flight Controller - 32х битный полетный контроллер, как раз для микрокоптеров.
Маленький, легкий, есть гироскоп и акселеромеры
- Мощный 32-битный микроконтроллер STM32 (128 кБ Flash памяти и 20 кБ оперативной памяти)
- 3-осевые высокопроизводительные MEMS гироскопы и 3-осевой MEMS акселерометр
- Компактная 36 × 36 мм
- Поддержка Windows, Mac и Linux ( поддержка Mac была для меня важна, так как ноут сейчас на этой платформе)
- Поддержка системы Futaba S/BUS ( тоже полезная для меня функция, так как уже есть аппаратура Futaba 8J )
- 4 МБ энергонезависимой памяти EEPROM для хранения настроек
- 3-осевые гироскопы и 3-осевой акселерометр MPU-6000
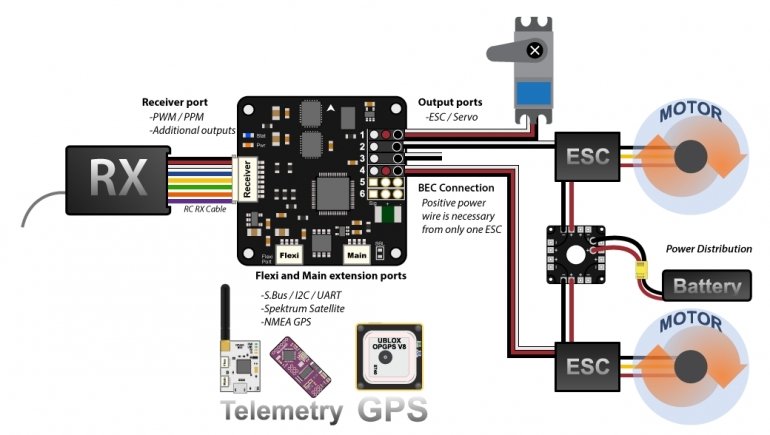
- Функции FlexiPort: телеметрия, GPS, периферийные устройства I2C (последнее еще в стадии разработки)
- 10 выходов PWM для сервоприводов или ESC либо для стабилизации камеры
- Поддержка 3-осевых подвесов с поддержкой ручного управления
Регуляторы скорости (ESC)
Думаю взять Spider 12A 2-4S
- Прошивка SimonK оптимизированная для мультикоптеров
- Частота ШИМ до 600Гц
- Гладкая линейная кривая газа
- Низкое внутреннее сопротивление
Моторы
Есть готовый набор моторов под эту раму, их и возьмем!
Tarot MT1806 2280 KV cw/ccw
Поставляются комплектом по 2 мотора с 4-мя винтами, что очень удобно - запасные винты лишними не бывают ;)
- Напряжение питания: 7.4-11.1 V (аккумуляторы 2-3S)
- Центральное отверстие пропеллера: 5 мм
- Размер воздушного винта: 5х3 - 5х4.5
- Максимальная тяга: 460 г
- Диаметр статора: 18 мм
- Диаметр мотора: 23 мм
- Количество полюсов: 14
- Ток без нагрузки: 0.4 - 0.7 А
- Внутреннее сопротивление: менее 4 мОм
- Обороты: 2280 kV ± 5%
- Вес мотора: 18 г
Видеолинк
Опять же возьмем готовы набор - приемника и передатчика Tarot 5.8 GHz
Передатчик легкий - 8.3 г (без антенны) и компактный - 21х22х7.5 мм.
- Рабочая частота: 5645-5945 MHz
- Количество каналов: 32 (4 полосы по 8 каналов)
- Мощность: 600 мВт (27.5 dbm)
- Входное напряжение: 7-26 V (2-6S)
- Выходное напряжение: 5 V 1 A
- Адаптер для антенны: SMA 50 Ом
FPV камера
И снова Tarot, модель 600 TVL. Маленькая - 21х26х30 мм, легкая - всего 15 грамм и с хорошим углом обзора - 120 градусов.
- Разрешение: 600 TV линий
- Видео система: PAL / NTSC
- Матрица: 1/3 inch HD Color CMOS
- Видео выход: 1.0Vp-p / 75 Ом
- Минимальная освещенность: 0.008 Люкс
- Потребляемый ток: 40 мА ± 10%.
- Рабочее напряжение: 5-15 В ± 10%.
- Синхронизация: внутренняя
- Фокусное расстояние: 2.8 мм
Телеметрия
В общем все скучно - Tarot TL300L.
Всего 20 грамм вместе с GPS и мелкая - 46х26х8 мм.
Картинки заменю на живые фото как только получу в руки запчасти )
-
Покупка
Поиск и покупка всего этого добра.
- Карбоновая рама Tarot 250 2050 рублей
- OSD с модулем GPS Tarot TL300L 2300 рублей
- FPV камера 600 TVL Tarot 1600 рублей
- Комплект антенн Tarot 5.8 Ghz RP-SMA 985 рублей
- Моторы Tarot MT1806 2280 KV cw/ccw два комплекта 3490 рублей
- Регулятор скорости Spider 12A 2-4S 4 штуки 2380 рублей
- Приемник FrSky Delta 8 2.4Ghz 1825 рублей
- Видео линк Tarot 5.8 GHz TL300N 3899 рублей
- Полетный контроллер CC3D 1420 рублей - спалил =(
- Полетный контроллер CC3D 1400 рублей + 300 рублей доставка на соседнюю станцию метро.
Все в сумме 19 949 рублей + 1700 за еще один контроллер CC3D = 21649 рублей
Стоимость этапа — 21649 ₽
![]()
-
Сборка
Для сборки понадобилось прикупить:
- припой
- игольчатое жало паяльника
- термоусадка
Всего вышло на 614 рублей.
Начал со сборки рамы, чтоб прикинуть что и где размещать и как будет выглядеть.
Рама Tarot 250 довольно компактная, есть разводка под питание компонентов и собирается довольно легко.
Разобрал и приступил к пайке.
- Залудил все контактные площадки, кроме площадок под выводы управляющих коннекторов ESC.
- Обрезал управляющие провода ESC до нужной длинны и припаял их к раме.
- Разместил и припаял OSD. Здесь поленился и не закрепил плату изолентой - результат, припаялась немного кривовато.
- Припаял передатчик для FPV. Тут надо обратить внимание, что в инструкции к раме ошибочно указан порядок контактов. Правильный порядок указан в инструкции к передатчику ( желтый, красный, черный).
- Припаял выводы для управляющих коннекторов ESC. В случае с контроллером CC3D нужно питание только с одного контроллера. Тут стоить заметить, что ESC Spider идут без бэка и питание с них получить не получится. По этому отдельный провод припаиваем к + контактной площадке ближайшего ESC.
- Прикручиваем моторы к раме. Все винты смазываем фиксатором резьбовых соединений ( локером ), чтоб от вибрации не вылетели.
- Собираем раму и проводим тест передачи видео сигнала. Ни когда не подавайте питание на приемник\передатчик FPV без антенн - можете спалить. Так же все детали рамы кроме основной платы распределения питания сделаны из карбона, а он проводит электричество. Чтобы избежать коротких замыканий нужно изолировать все места пайки. Это можно сделать клеевым пистолетом или специальным герметиком.
- Установил контроллер CC3D. Вот тут надо было проверить все соединения перед подключением батареи, я этого не сделал - результат сгоревший контроллер. Одно из соединений отошло и замкнуло с соседним. Пришлось заказывать новый полетный контроллер.
Стоимость этапа — 614 ₽
![]()
![]()
![]()
-
Настройка
Настройка полетного контроллера и аппаратуры управления.
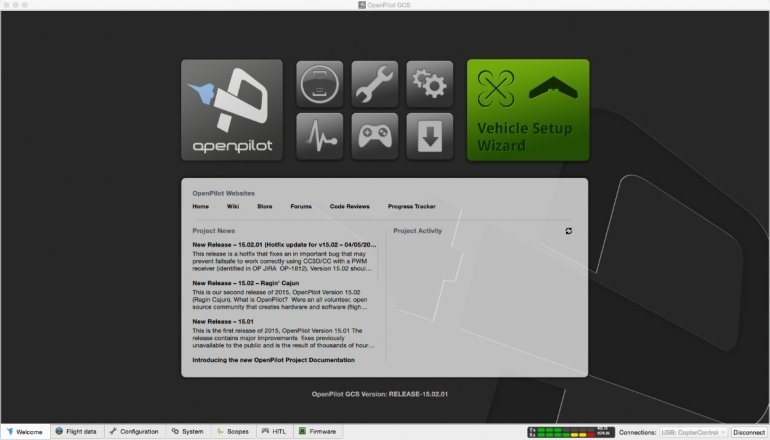
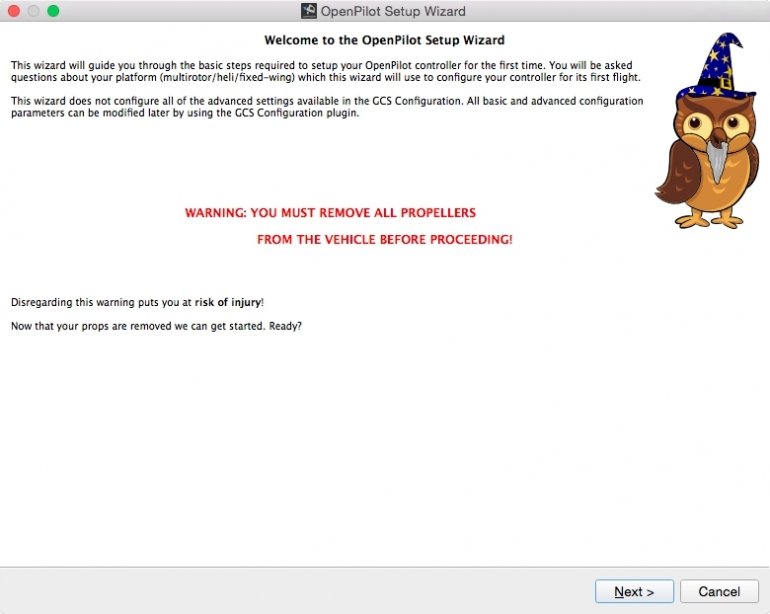
- Подключаем контроллер CC3D к PC/MAC и запускаем утилиту OpenPilot GSC
- Нажимаем на большую зеленую кнопку Vehicle setup wizard
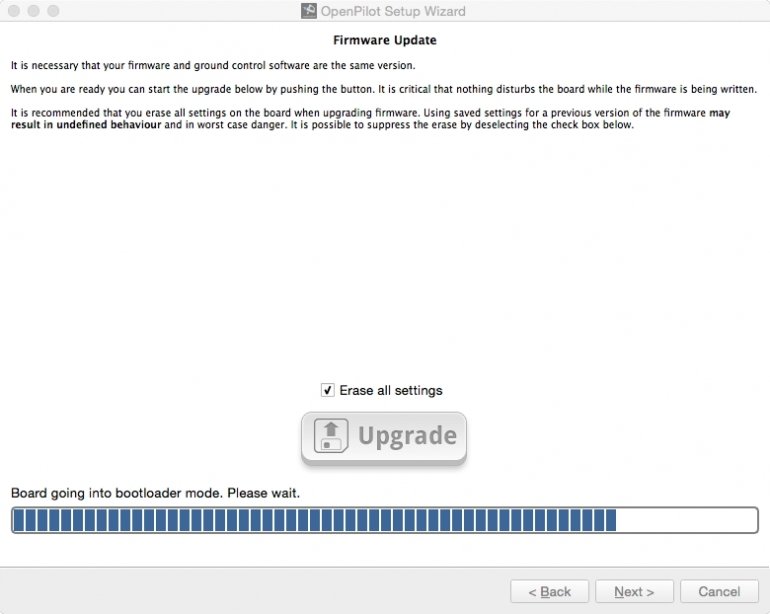
- Ставим чекбокс "Erase all settings" и нажимаем Upgrade
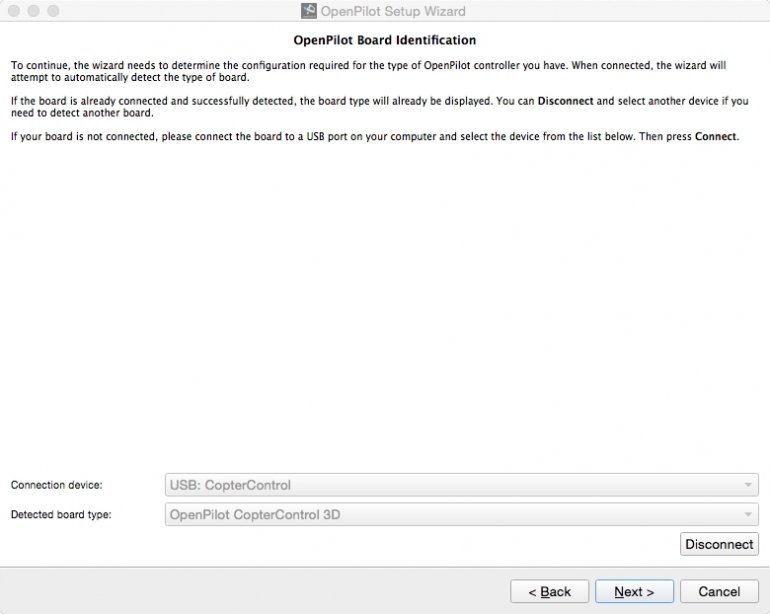
- На следующем экране должно отображаться модель контроллера - OpenPilot CopterControl 3D и интерфейс подключения - USB: CopterControl
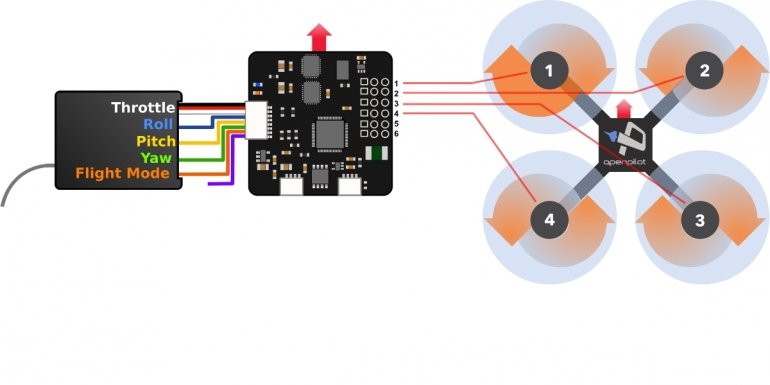
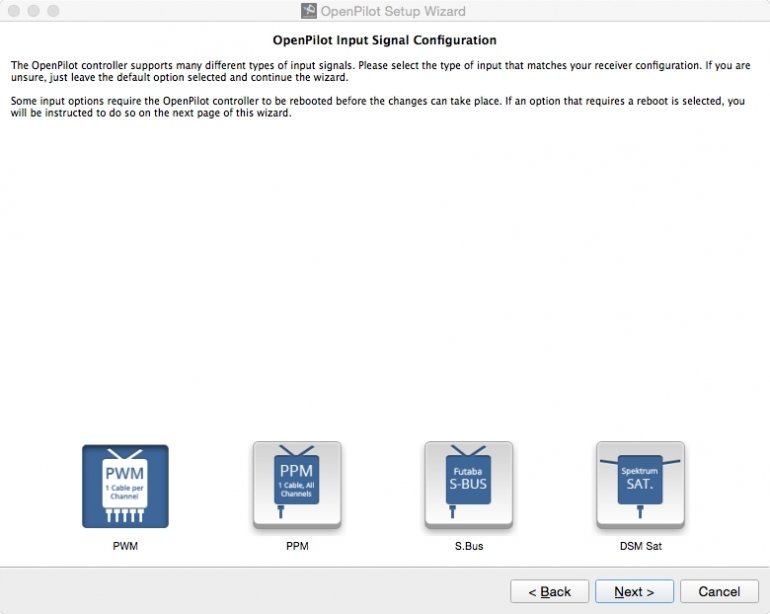
- Выбираем схему подключения приемника аппаратуры управления. В моем случае это PWM. S-BUS не получилось заставить работать
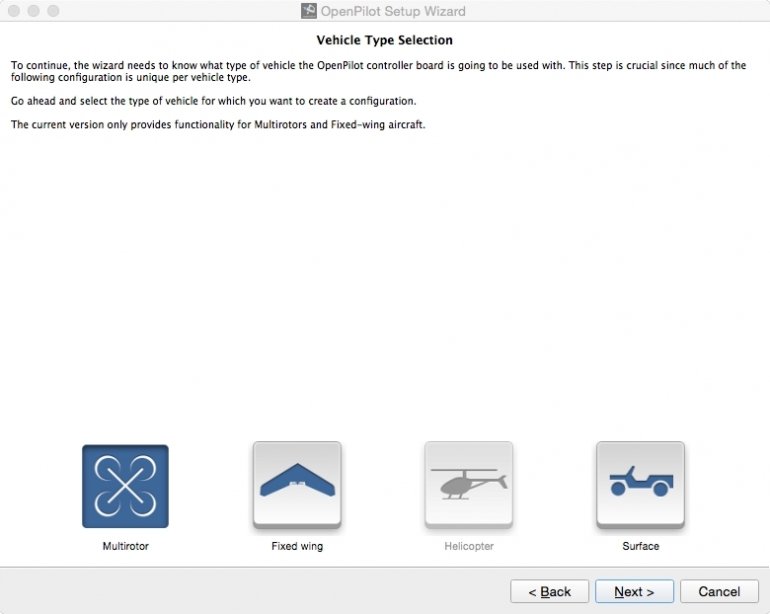
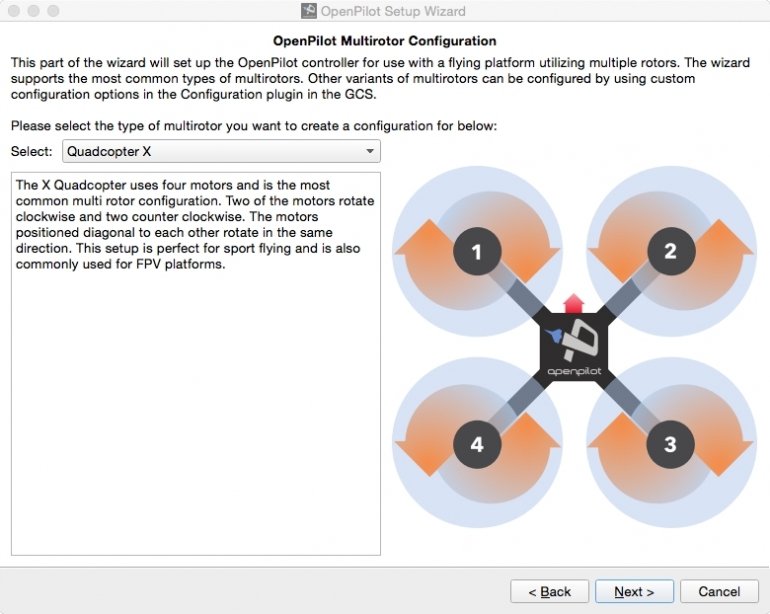
- Выбираем тип модели - Multirotor
- Выбираем схему мультикоптера - quadcopter X
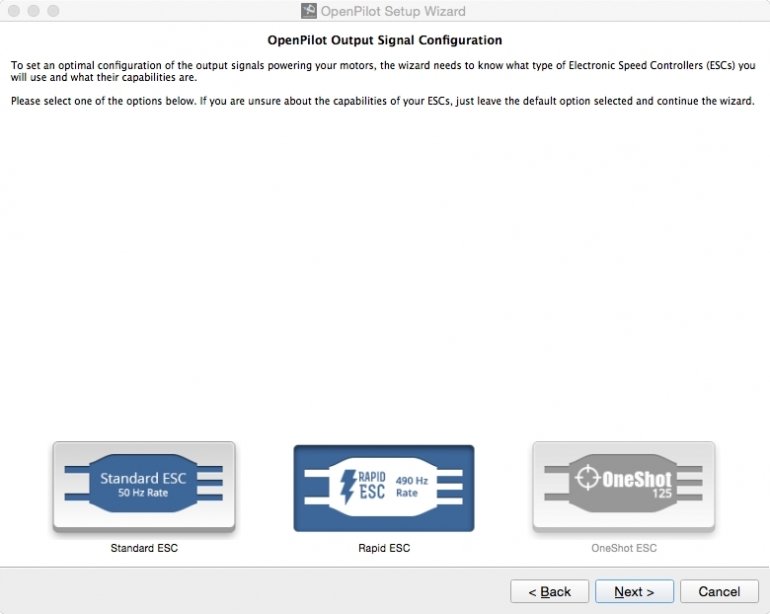
- Выбираем тип ESC, в моем случае - Rapid ESC
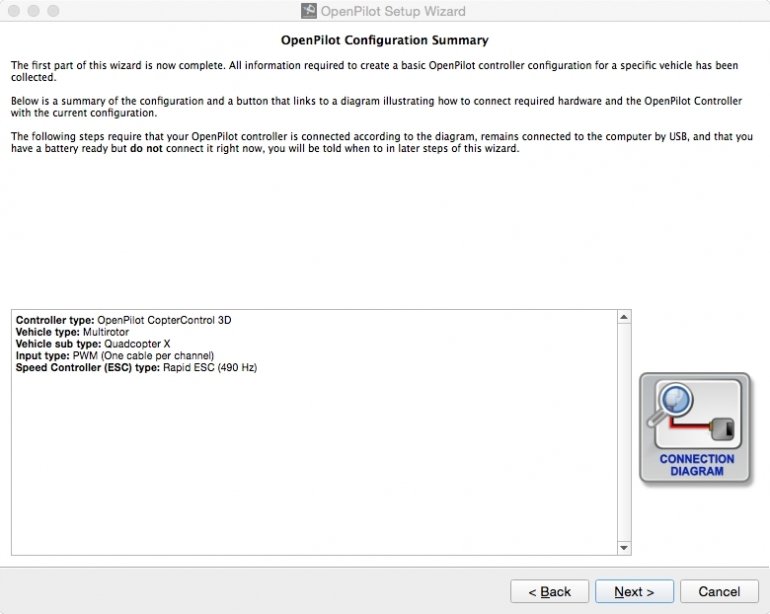
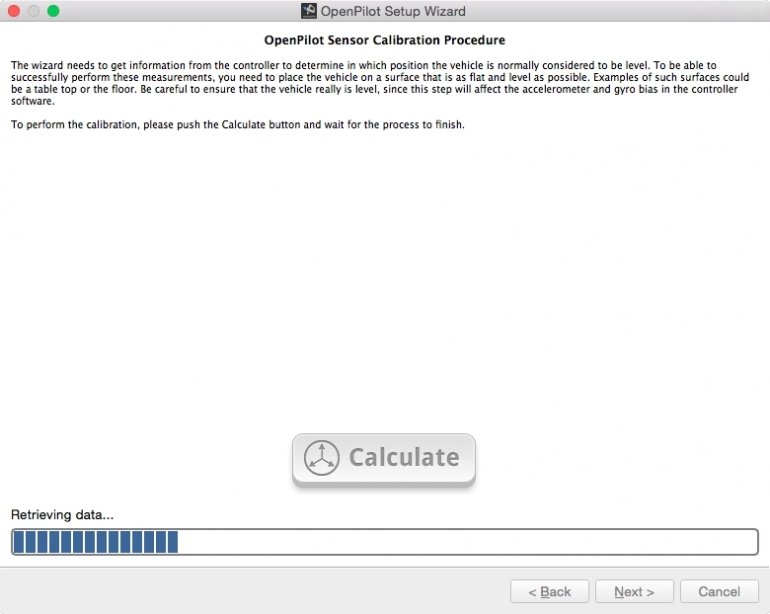
- Проверяем базовые параметры системы
- Нажимаем Calculate для калибровки контроллера. Коптер необходимо расположить на ровной поверхности и не трогать до конца калибровки
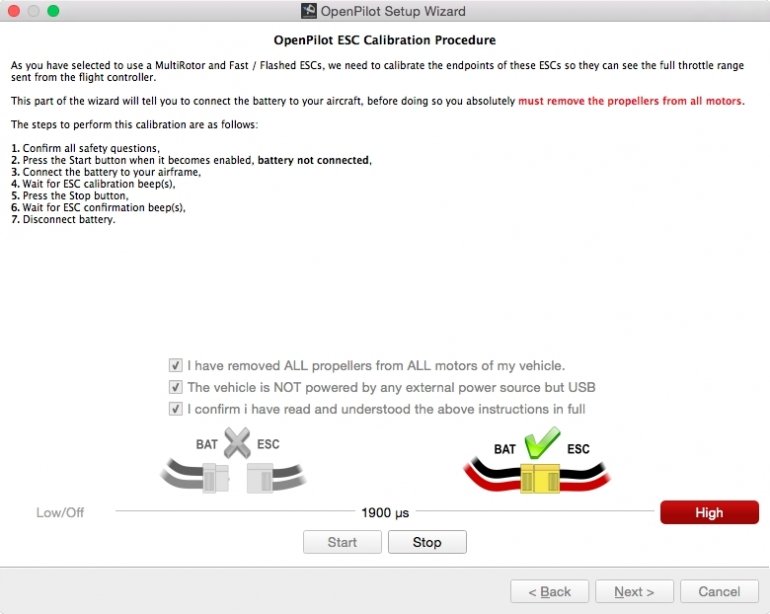
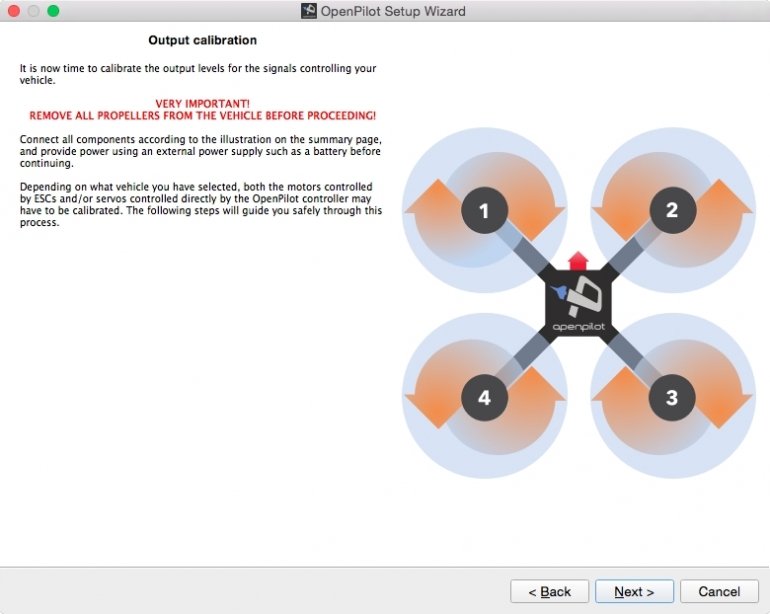
- Калибруем ESC. Обязательно снимите винты с моторов перед этой процедурой.
- Настраиваем минимальный газ для каждого мотора
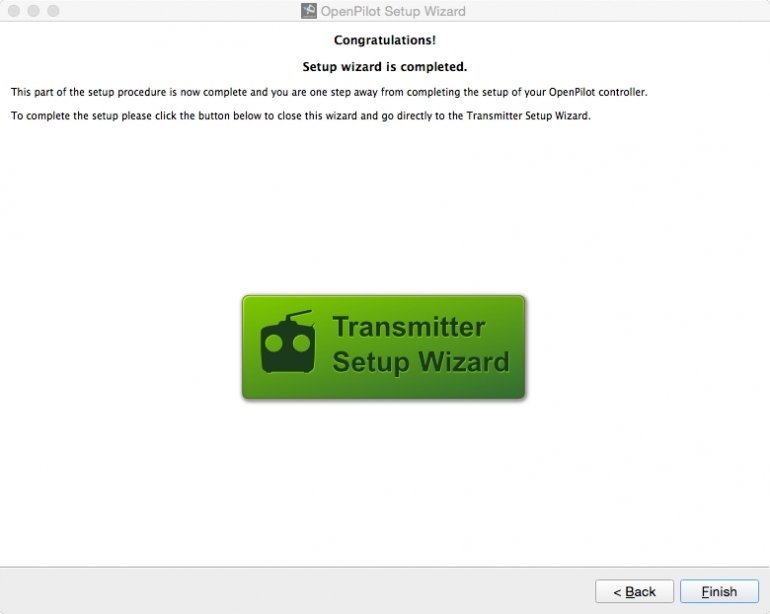
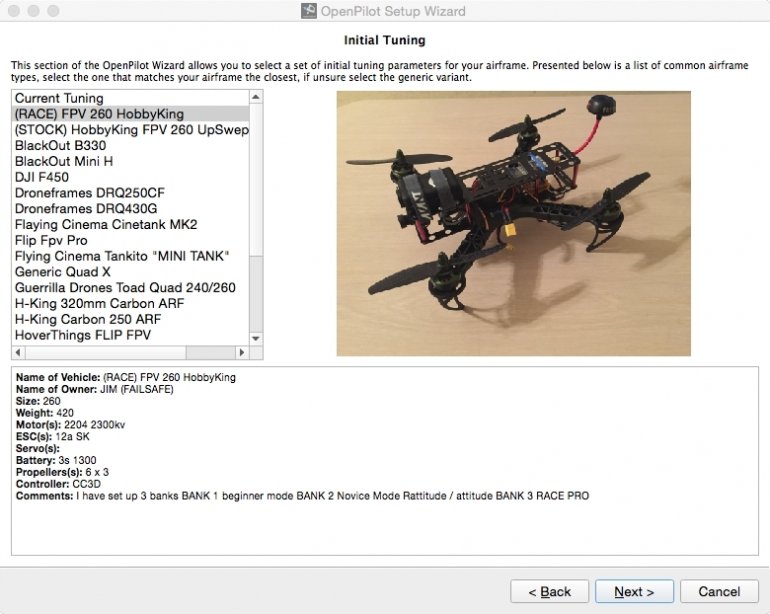
- Завершаем настройку. В прошивке CC3D есть заготовки для нескольких моделей коптеров, можете выбрать одну из них, если у вас соответствующая рама.
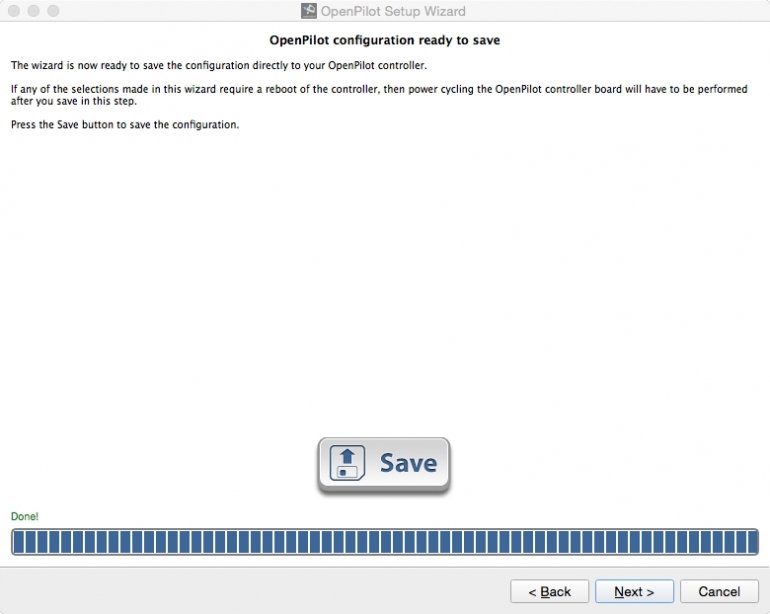
- Нажимаем Save и прошивка записывается в память контроллера
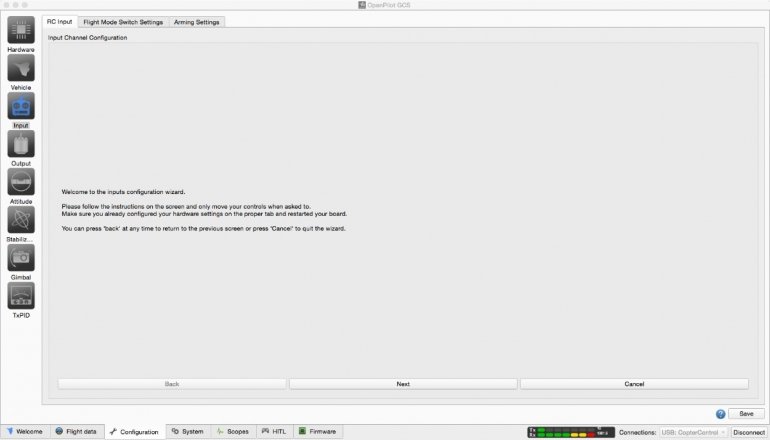
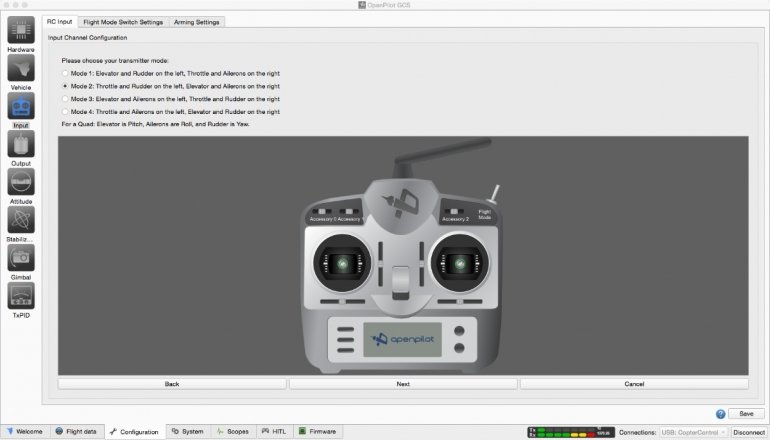
- Далее приступаем к настройке аппаратуры управления
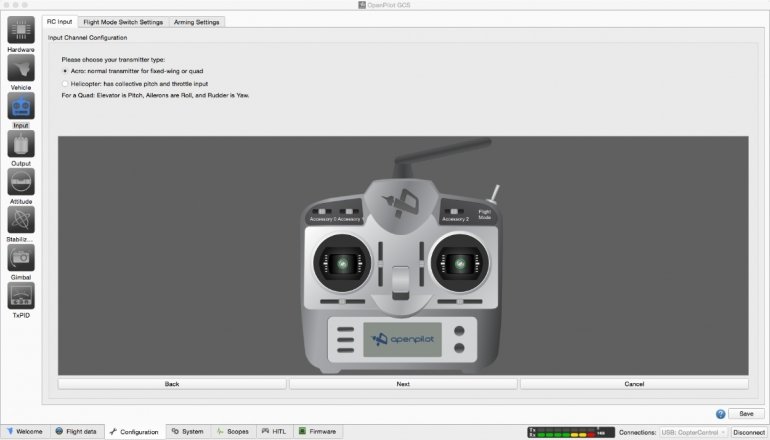
- Выбираем тип передачик, самолетный или вертолетный
- Выбираем привязку каналов управления
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
-
Тестирование
Проведение тестовых полетов.
-
Полетушки
Полетушки по местности с препядствиями - в лесу =)

Не пропустите новые записи!
Подпишитесь на цель и следите за ее достижением







{kind=link}
{kind=link}