Мета закинута
Автор не відписував в цілі 10 років 5 месяців 21 день

Make my own autopilot
I have studied applied mathematics and electronics. My diploma will be about mathematical model and autopilot development for quadrocopter autopilot. The mathematical model for this UAV have already been done.
The main idea is to make autopilot product without PID regulators and with adaptation and user-friendly settings.
Критерій завершення
The final product have been done and selling.
Особисті ресурси
Mathematics skills
Programming skills
Electronics skills
RC aviation experience
-
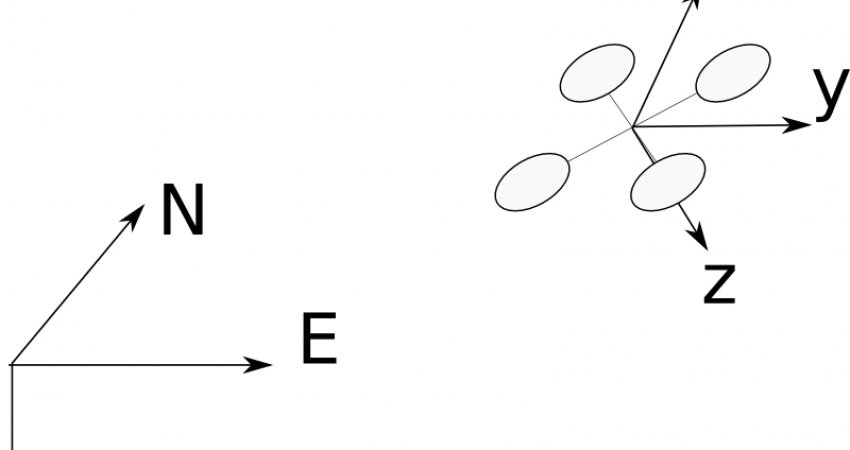
Create exact model of quadrocopter
- Get real motor characteristics
- Function of rotation frequency from control
- Function of force from frequency
- Function of force from control
- Add motor model to copter model
- Deal with delays
- Get real motor characteristics
-
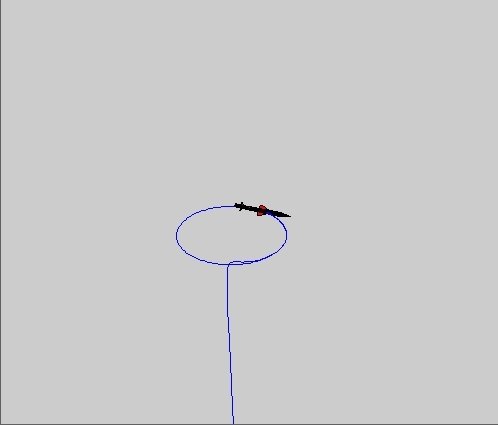
Add adaptation to autopilot model
- Find book about this
- Add adaptive autopilot to Simulink model
![]()
![]()
-
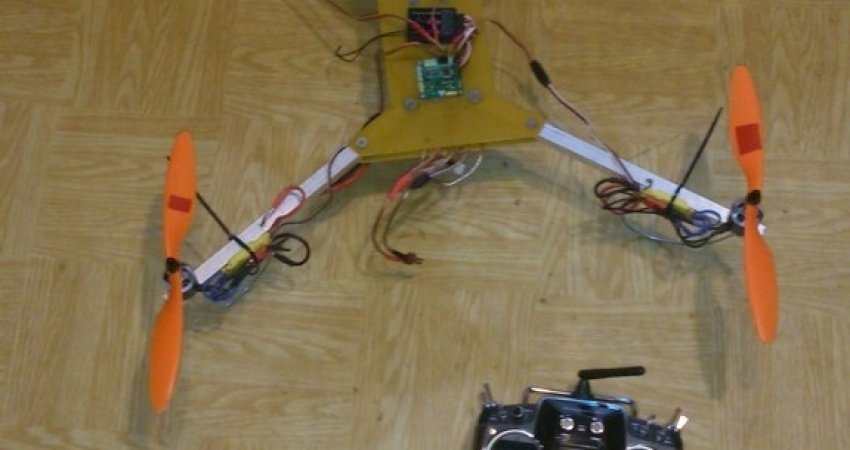
Create electronics prototype
- Use stm32 microprocessor
- Use MPU6050 acc/gyro
- Use any baro
- Use GPS
- Use Mavlink
Вартість етапу — 1000 $
![]()
-
Make product design
Create nice and pretty product design
- Make case
- Make PCB for it
Вартість етапу — 500 $
-
Advertize a product
- Send some to flitetest
- Make preorder form
- Sign partnership with stores
Вартість етапу — 1000 $



Не пропустіть нові записи!
Підпишіться на ціль і стежте за її досягненням




{kind=link}
{kind=link}
{kind=link}